【成果简介】
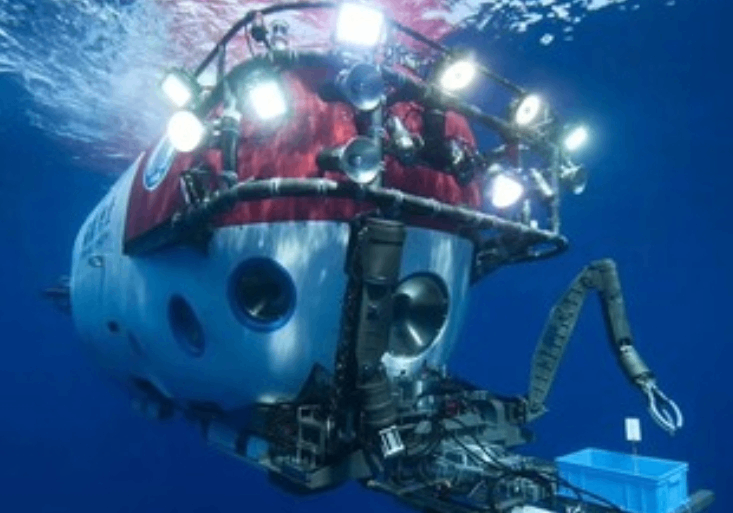
本项目瞄准水下灵巧操作机器人的痛点问题,研究新型水下机器人 大范围巡航与机械臂灵巧作业机理,突破固液耦合动力学控制、物理建 模与神经网络相结合的流固耦合局部建模方法、复杂工况下快速协同的 有限时间控制、数字孪生与混合现实等技术,形成自治型水下灵巧机器 人的高效能新构型,实现低速率通信条件下高性能遥操作控制能力。在 新型多模态水下作业机器人灵巧操控关键技术研究基础上,突破水动力 学导致的控制不可预测性、水下感知的不完备性、声纳通信导致的大时 延等关键技术,在此基础上,研制混合现实设备、水下机械臂,构建桌 面系统,为水下灵巧操作机器人的工程应用提供稳定新技术支持。
【技术指标】
项目隶属于 JKW 前沿探索项目子课题,瞄准海底光缆剪切、水雷拆 除等 JS 需求。在水下局部博弈场景下,通过灵巧精准的攻击带来非对称 优势。项目结题后,拟达到国际先进水平。
【技术成熟度】
正在研发
【应用情况】
目前项目作为海军研究院开发项目,后续拟在近海开展实物实验, 后续可推广至军方应用,未来可应用于近海作战、抢滩登陆等作战场景。