【成果简介】
在狭窄且不规则的废墟环境中,现有的救援机器人工作空间受限难 以发挥其全部性能。受大食蚁兽捕食白蚁过程的启发,提出了一种连续 体类型的救援软体机器人。该机器人由柔性连续体机械手和驱动装置组 成,利用齿轮啮合实现推进和气驱动的弯曲变形实现避障,具有快速推 进和适应非结构环境的特点 。该驱动装置可使机械手的最大速度为 14.67cm/s ,最大推进力为 19.20N 。基于软机器人的柔顺性,机械手能够 在推进运动作用下自适应地贴合障碍表面从而通过障碍。不同条件下的 自适应性能测试实验表明,该机器人最高可以通过轴线与接触面夹角达 80.57°的障碍物。在实际场地测试中,机器人最高可以穿越 1.3m 深的随 机形成的狭窄砖混结构通道。
【技术指标】
软连续体救援机器人(长度 3.4m)最大速度为 14.67cm/s,最大推进 力为 19.20N;能够维持直线运动最远距离 3. 1m、弯曲运动最远距离 1.5m; 利用适应性,可以被动地通过轴线与接触面夹角达 80.57°的障碍物;可 以主动变形通过 15cm 高的阶梯与越过 30cm 宽的坑洞;最高可以穿越 1.3m 深的随机形成的狭窄砖混结构通道。
【技术成熟度】 正在研发
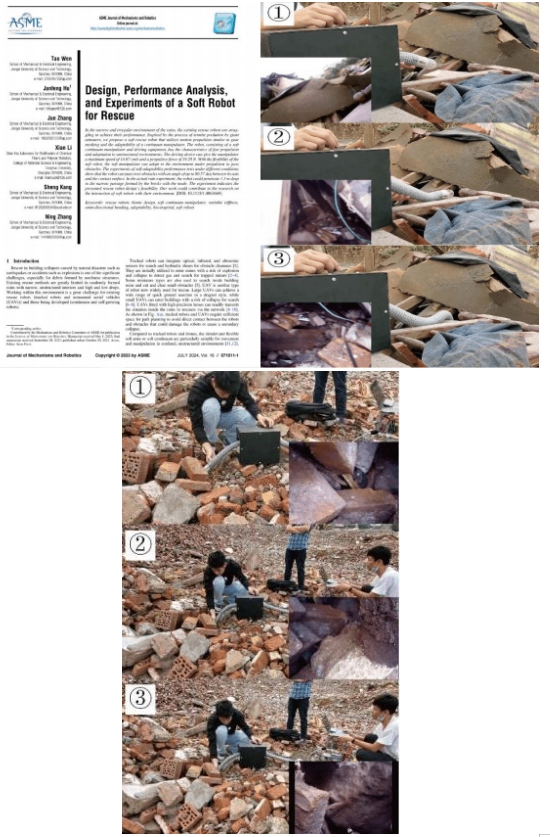
【应用情况】
在废墟模型和实际废墟的测试中,软连续体救援机器人已经成功实 现了在狭窄和非结构化障碍物内的灵活与快速避障,灵活性、适应性、 可变刚度等特点使其在房屋废墟、溶洞等非结构化环境中的救援中具有 相当大的优势。